Next: Aufgaben Up: Design-Patterns Previous: Singleton Pattern
Auch Signal-Slot Mechanismus behandelt dieses Problem. Qt Signal-Slot mögliche Lösung, allerdings Erweiterung von C++ nötig.
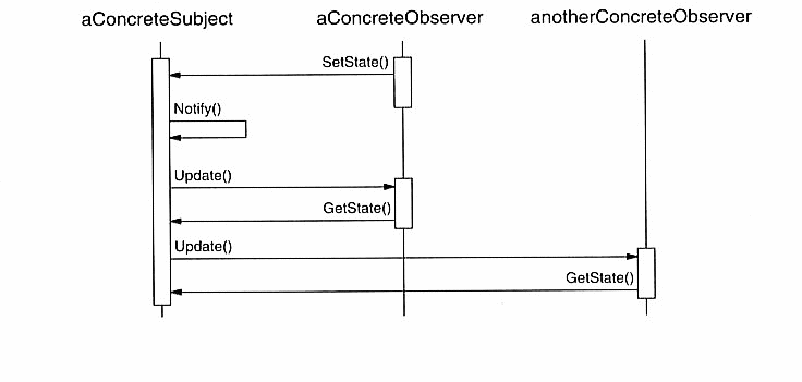
 Observer - Sequenz Diagram
Observer - Sequenz Diagram
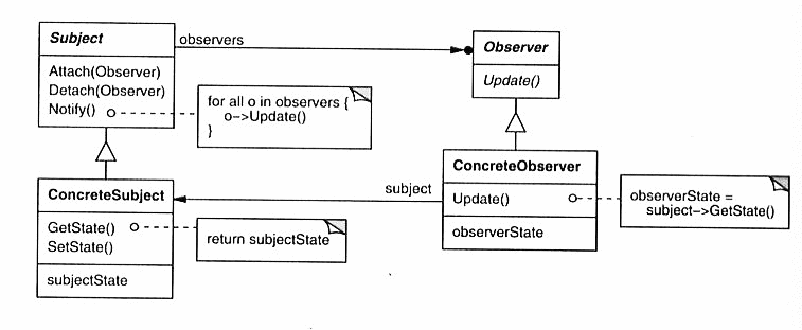
 Observer in C++
Observer in C++
class Subject;
// Observer: just an interface
class Observer {
public:
Observer(){};
virtual ~Observer(){};
virtual void update(Subject* ) = 0;
};
class Subject {
public:
Subject();
virtual ~Subject(){};
virtual void attach(Observer*);
virtual void detach(Observer*);
virtual void notify();
virtual void setChanged();
private:
list<Observer*> observers; // list to hold observers
bool changed;
};
void Subject::setChanged() {
changed = true ;
}
Subject::Subject() : changed(false) {}
void Subject::attach (Observer* o) {
observers.push_back( o);
}
void Subject::detach (Observer* o) {
observers.remove(o);
}
void Subject::notify () {
// notify observers if changed flag is set
if ( changed ) {
list<Observer*>::iterator i = observers.begin();
for ( ; i!= observers.end(); i++ ) {
(*i)->update(this);
}
changed = false;
}
}
#include <list>
#include <iterator>
#include <iostream>
using namespace std;
// real classes using the Observer
class Sensor : public Subject { // simulates temperature sensor
private:
int temp;
public:
Sensor();
void takeReading();
int getReading();
};
Sensor::Sensor() {
temp = 20; // set some start value
}
void Sensor::takeReading() {
double d; // randomly change temperature in 50% of times
d = rand()*1./(RAND_MAX+1.0);
if(d>0.75) {
temp++;
setChanged();
} else if (d<0.25) {
temp--;
setChanged();
}
cout << " [Temp: " << temp << "] ";
}
int Sensor::getReading() {
return temp;
}
class Display : public Observer {
public:
virtual void update(Subject * o);
};
void Display::update(Subject * o) {
Sensor * s = dynamic_cast< Sensor *>(o);
if ( s ) {
cout << "New Temp: " << s->getReading();
}
}
int main()
{
Sensor *sensor = new Sensor(); // subject
Display *display = new Display(); // Observer
// register observer with observable class
sensor->attach(display); // Simulate measuring temp over time
for(int i=0; i < 20; i++) {
sensor->takeReading();
sensor->notify();
cout << endl;
}
return 0;
}
Im Beispiel wird notify() von aussen (=main()) angestossen. Kann aber genauso direkt vom Subject Sensor gemacht werden.
GDuckeck 2019-08-01